









GPS Matek GNSS M8Q-CAN, UAVCAN und MSP
Spezifikationen:
- CAN ArduPilot AP_Periph F303 CAN-Knoten
- GPS SAM-M8Q (GPS, GLONASS, Galileo)
- Magnetischer Kompass QMC5883L
- Barometer DPS310
- UART1, Firmware-Aktualisierung
- UART2, integriertes GPS
- UART3, MSP-Protokoll (muss kompatibel sein)
- CAN-Protokoll, UAVCAN
- I2C, QMC5883L und DPS310 an Bord
- I2C-Stecker JST-GH, externer AirSpeed-Sensor
- LED des CAN-Bootloaders, blau
- Schnelles Blinken, keine Kommunikation zwischen CAN-Knoten und Flugsteuerungen.
- langsames Blinken, Kommunikation zwischen CAN-Knoten und Flugsteuerungen
- GPS PPS LED, grün
- blinkend (1Hz), wenn GPS 3D fixiert hat
- Schaltfläche “Start
- Eingangsspannungsbereich: 4 ~ 6 V
- Stromverbrauch: 100 mA
- Betriebstemperaturen: -20 ~ 80 ° C
- 29 mm x 29 mm x 9,7 mm
- Gewicht: 11,3 g
Ratschläge:
- Die u-blox M8Q-Serie hat keinen externen Flash-Speicher.
- Kompassausrichtung (Vorwärtspfeil und flache Halterung): Ardupilot / Mission Planner: Rotation Keine
- Stellen Sie sicher, dass Sie einen Kompass / Magnetometer 10 cm von Stromleitungen / ESC / Motoren / eisenhaltigem Material entfernt haben.
- Kratzer auf der Keramikantenne sind das Ergebnis der Abstimmung der Antenne durch ublox.
- Das UART3 MSP-Protokoll ist zur Zeit nicht implementiert.
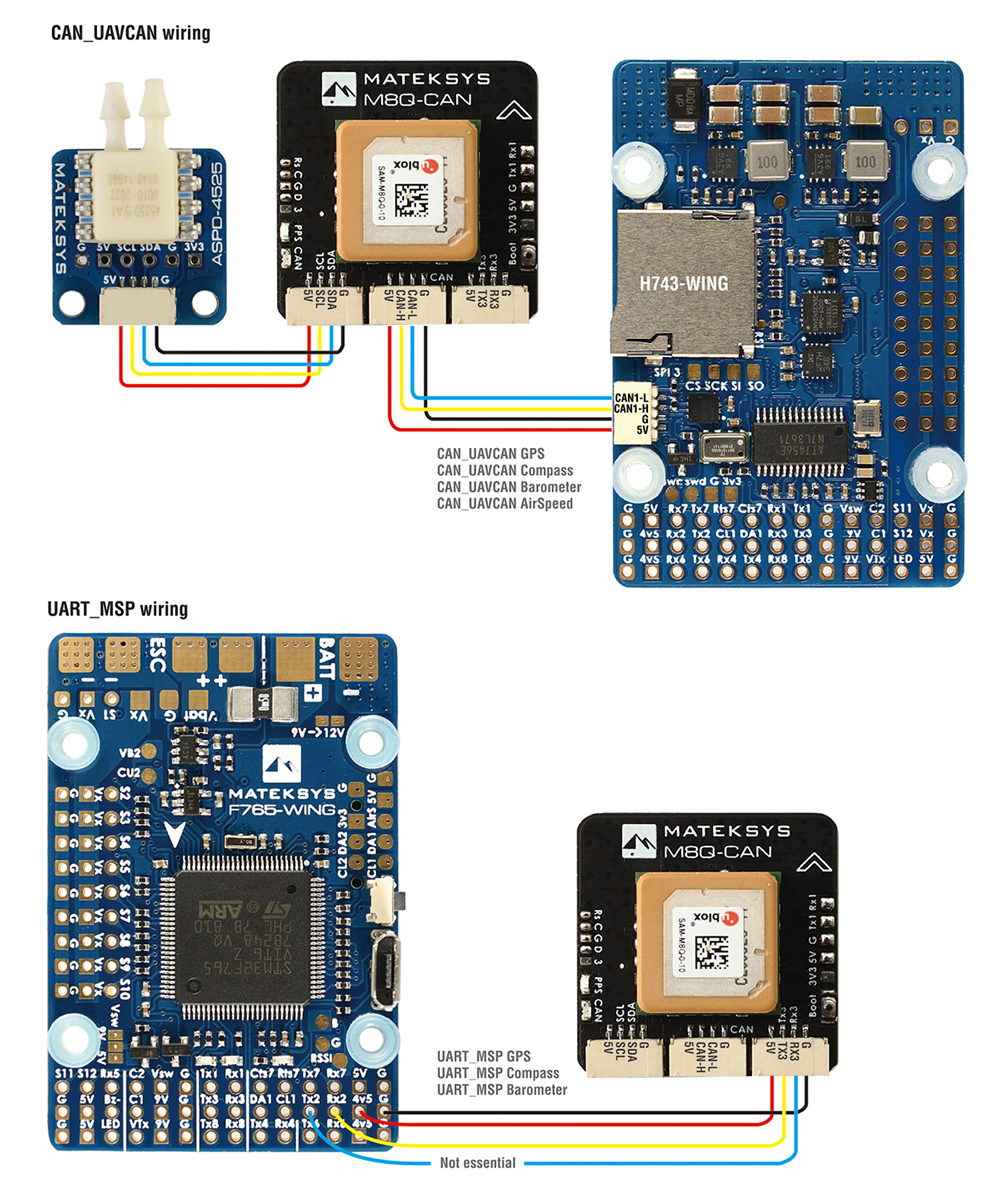
Schaltplan:
Das Paket enthält:
- 1 x M8Q-CAN
- 2 x 20 cm Silikonkabel JST-GH-4P auf JST-GH-4P













What others are saying
There are no contributions yet.